

So you have a DeepRacer, and you want to learn more about the software that’s on it, read on!
ROS Kinetic

At the time of this writing, the DeepRacer runs ROS Kinetic. The Robot Operating System (ROS) isn’t really an operating system; it’s more like a software development kit (SDK). It’s a set of software libraries and tools that help you build robot applications. It’s a staple in many university programs in Robotics, and it is easy to add new packages to share with the world. Best of all, it’s all open source.
ROS Kinetic is the long-term support (LTS) version of ROS that works with Ubuntu Xenial 16.04. Its support ends in April 2021, so I hope that Amazon is planning on releasing an update!
Setting up the DeepRacer
The first thing you’ll do when setting up your DeepRacer is to connect it to your computer so you can set up its wifi. Begin by following the setup instructions.
After you’ve set up the wifi network, you can reconnect to the DeepRacer via your browser. Type in the IP address of your DeepRacer into your browser, and you’ll see the vehicle control and settings.
To interface with ROS instead of using the web console, you’ll need to enable SSH. Inside the DeepRacer console, click on settings->SSH.
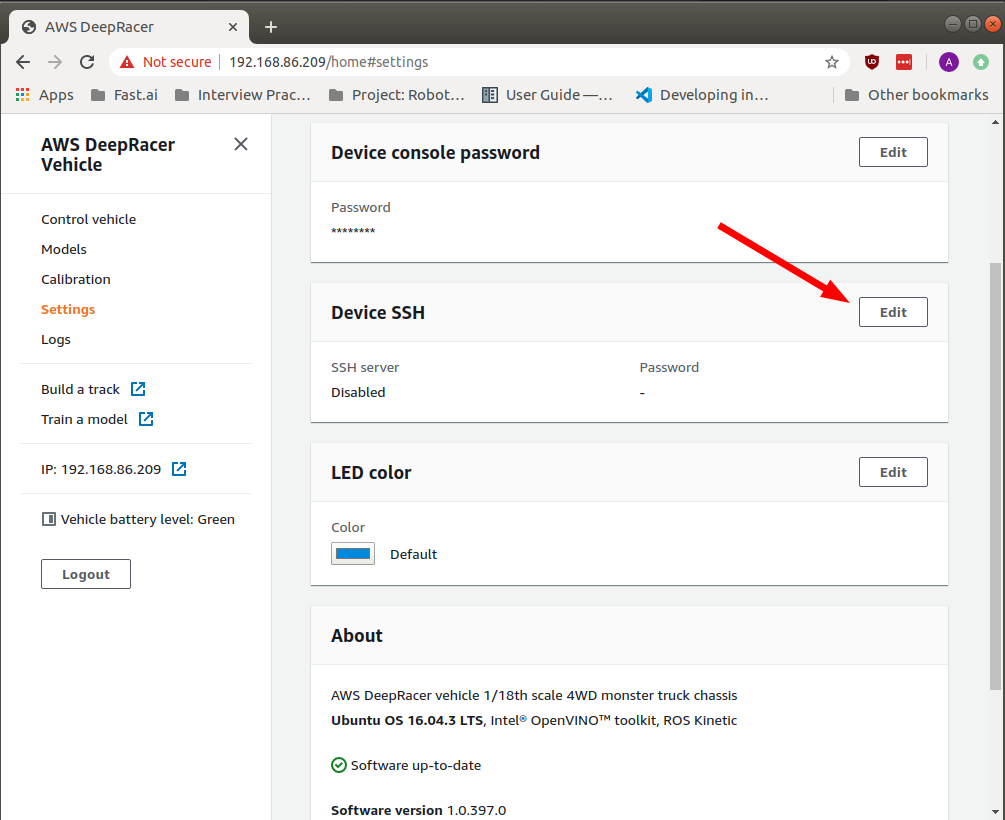
Go ahead and click “enable” and set up your SSH password.
Note
The default username is DeepRacer.
After you’ve enabled SSH, you can now log into your DeepRacer from the terminal.
export DEEPRACER_IP=<the IP address>
ssh deepracer@$DEEPRACER_IP
When it asks you for a password, enter the one you created on the webpage.
Note
This password is different from the default password to log into the DeepRacer console webpage.
Now you can start exploring the software that’s running
Exploring the software
The first thing I did was find where the software was. Since ROS is normally
installed into the /opt directory, that’s the first place I looked.
deepracer@amss-hd4i:~$ cd /opt
deepracer@amss-hd4i:/opt$ ls
aws ros
As you can see, we have the base ROS installation in ros and a custom aws
folder. Let’s see what’s in there!
deepracer@amss-hd4i:/opt$ cd aws/
deepracer@amss-hd4i:/opt/aws$ ls
deepracer intel pyudev
deepracer@amss-hd4i:/opt/aws$ cd deepracer/
deepracer@amss-hd4i:/opt/aws/deepracer$ ls
artifacts env.sh password.txt setup.zsh token.txt
brazil-npm-registry led_values.json setup.bash share util
calibration.json lib setup.sh software_update_status.json
camera nginx _setup_util.py start_ros.sh
There’s a suspiciously titled start_ros.sh script in this directory that
probably tells us a whole lot about how the software is started. The contents of
this file are:
source /opt/ros/kinetic/setup.bash
source /opt/aws/deepracer/setup.bash
source /opt/aws/intel/dldt/bin/setupvars.sh
export PYTHONPATH=/opt/aws/pyudev/pyudev-0.21.0/src:$PYTHONPATH
roslaunch deepracer_launcher deepracer.launch
Here, we can see this file:
- Sources the ROS Kinetic installation
- Sources the AWS DeepRacer installation
- Sets up the inference engine
- Sets up USB devices for access in Python
- Launches the software suite.
After sourcing the Kinetic and DeepRacer installations, we can now run DeepRacer ROS commands.
There are a couple of commands that let you introspect the ROS software system.
The first we are going to use is the rosnode list command. This command will
print all of the ROS programs that are running.
deepracer@amss-hd4i:/opt/aws/deepracer$ rosnode list
/battery_node
/control_node
/inference_engine
/media_engine
/model_optimizer
/navigation_node
/rosout
/servo_node
/software_update
/web_video_server
/webserver
Since there isn’t any documentation on the ROS nodes running, I will guess at their function.
- battery_node: A battery monitoring process
- control_node: The interface to the robot drive train that incorporates calibration
- inference_engine: ML inference engine for controlling the bot
- media_engine: Publishes camera data
- model_optimizer: Loads/compresses your model for the inference engine
- navigation_node: The interface to control commands
- rosout: default ROS system status
- servo_node: Low-level servo controller
- software_update: Update software/ml model
- web_video_server: Compress the video stream and serve it on a port
- webserver: Serve the webpage for the robot
If you want to learn more about any particular node, enter
rosnode info <node_name>.
For example, if you want to know more about the navigation node:
deepracer@amss-hd4i:/opt/aws/deepracer$ rosnode info /navigation_node
--------------------------------------------------------------------------------
Node [/navigation_node]
Publications:
* /auto_drive [ctrl_pkg/ServoCtrlMsg]
* /rosout [rosgraph_msgs/Log]
Subscriptions:
* /rl_results [unknown type]
Services:
* /load_action_space
* /navigation_node/get_loggers
* /navigation_node/set_logger_level
* /navigation_throttle
contacting node http://amss-hd4i:38873/ ...
Pid: 2996
Connections:
* topic: /auto_drive
* to: /control_node
* direction: outbound
* transport: TCPROS
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS
You can see that it publishes two topics – /auto_drive of type
ctrl_pkg/ServoCtrlMsg and /rosout, which is the default ROS logging topic of
type rosgraph_msgs/Log. It also subscribes to one topic – /rl_results of an
unknown type. ROS will sometimes report topic types as unknown when no
module is publishing them.
If you want to know more about that topic, you can use rostopic info.
deepracer@amss-hd4i:/opt/aws/deepracer$ rostopic info /rl_results
Type: inference_pkg/InferResultsArray
Publishers: None
Subscribers:
* /navigation_node (http://amss-hd4i:38873/)
The output tells us that the type is inference_pkg/InferResultsArray, that no
one is currently publishing to the topic, and that the navigation_node is a
subscriber.
If you want to know more about the message, you can use rosmsg show to see the
message format
deepracer@amss-hd4i:/opt/aws/deepracer$ rosmsg show inference_pkg/InferResultsArray
inference_pkg/InferResults[] results
int32 classLabel
float32 classProb
float32 xMin
float32 yMin
float32 xMax
float32 yMax
sensor_msgs/Image img
std_msgs/Header header
uint32 seq
time stamp
string frame_id
uint32 height
uint32 width
string encoding
uint8 is_bigendian
uint32 step
uint8[] data
The navigation_node also lists the services which (other than logging) are
/load_action_space and /navigation_throttle.
Services, like topics, allow you to find out more information. But this time,
you’ll need to use the command rosservice info.
deepracer@amss-hd4i:/opt/aws/deepracer$ rosservice info /load_action_space
Node: /navigation_node
URI: rosrpc://amss-hd4i:38519
Type: inference_pkg/LoadModelSrv
Args: artifactPath taskType preProcessType
And like topics, you can query the message format for a service using
rossrv show.
deepracer@amss-hd4i:/opt/aws/deepracer$ rossrv show inference_pkg/LoadModelSrv
string artifactPath
int8 taskType
int8 preProcessType
---
int32 error
Connecting to another computer
One of the biggest advantages of ROS is being able to connect to other computers on your network. To connect, you will need ROS. You can use my docker image to get started quickly.
But since ROS uses ephemeral ports to connect nodes, you’ll need to first disable the firewall on the DeepRacer with the following command:
deepracer@amss-hd4i:/opt/aws/deepracer$ sudo ufw disable
Note
The password for
sudois the same as your SSH password.
Now on your computer, run my docker image with the following command:
docker run --network=host -it althack/ros:kinetic-dev bash
This command starts the docker image in an interactive terminal and shares the host network. You’ll want to share your network with the docker image for the same reason you needed to disable the firewall.
Now all you need to do is set the ROS_MASTER_URI to your DeepRacer through an environment variable.
root@x1-carbon:/$ export ROS_MASTER_URI=http://$DEEPRACER_IP:11311
Don’t forget to add the 11311 for the port the rosmaster host is listening
to!
Once the ROS master is set, you can do things like list, echo, and publish messages to topics to control your DeepRacer.
root@x1-carbon:/$ rostopic list
/auto_drive
/calibration_drive
/manual_drive
/rl_results
/rosout
/rosout_agg
/video_mjpeg
Related posts
VSCode, Docker, and Github Pages
As a casual user of GitHub Pages, I find that I continually have to remember how I set up the development environment so I can edit my website. There’s nothing worse than losing hours to configuration nightmares on coding that is supposed to be fun. And since I use docker and vscode, it was a pretty easy decision to try to put my website workspace into a container.
Controlling the DeepRacer with a gamepad
The first thing I wanted to do when I got my DeepRacer was to drive it around. It comes with a web interface where you can run it in “manual” mode, but I wanted to use a gamepad controller. (By default the web interface is only controllable via mouse.)
Creating a Culture of Documentation
Documentation is one of those things that often gets overlooked. After all, it’s not strictly required for your code to run! But there is a great amount of value to be gained by creating a culture of documentation. I’m not talking about the “low quality” documentation that insists on simply re-writing in prose the name of the variable.